ML_2021_4-2 自注意力機制(下)
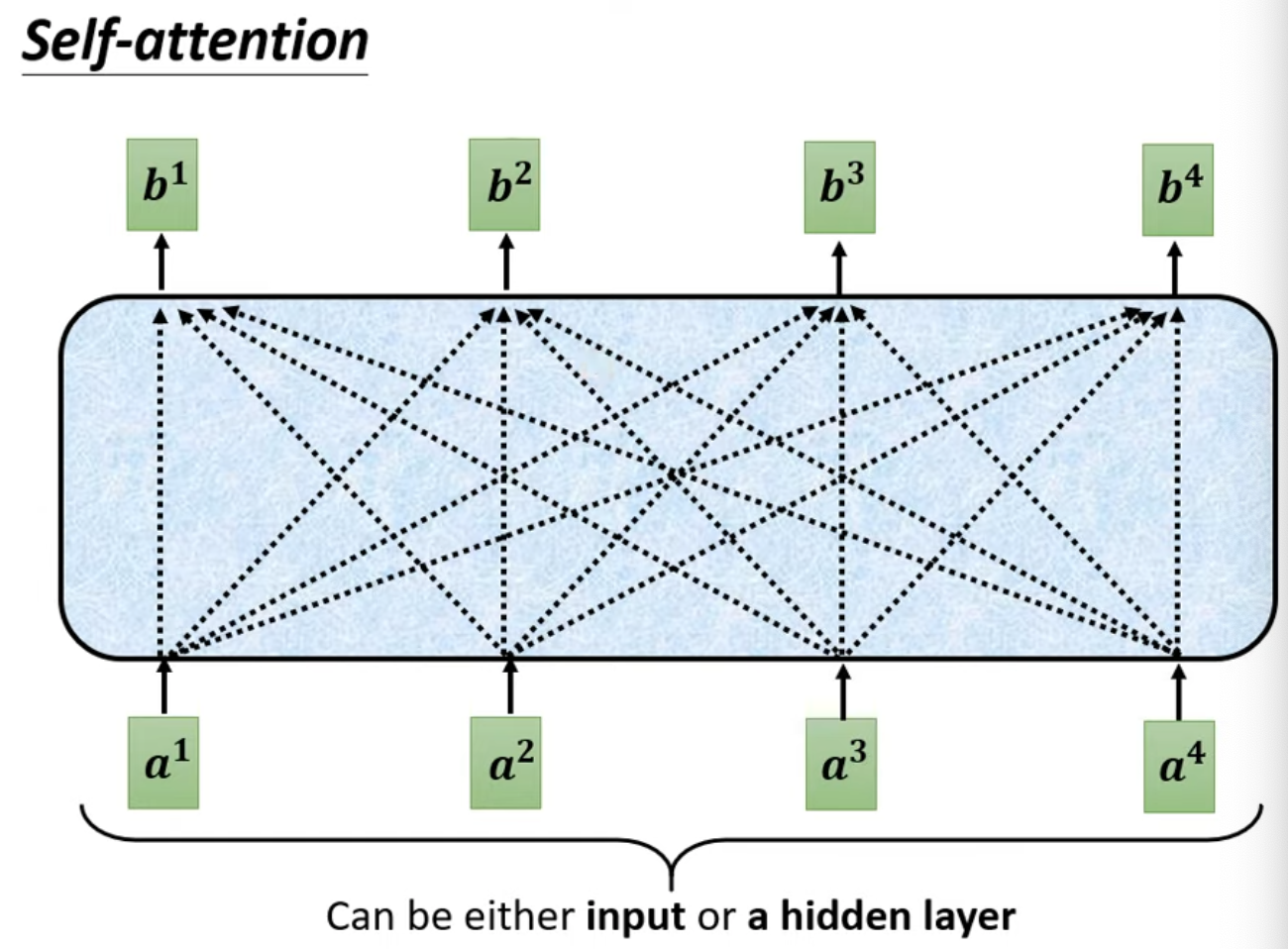
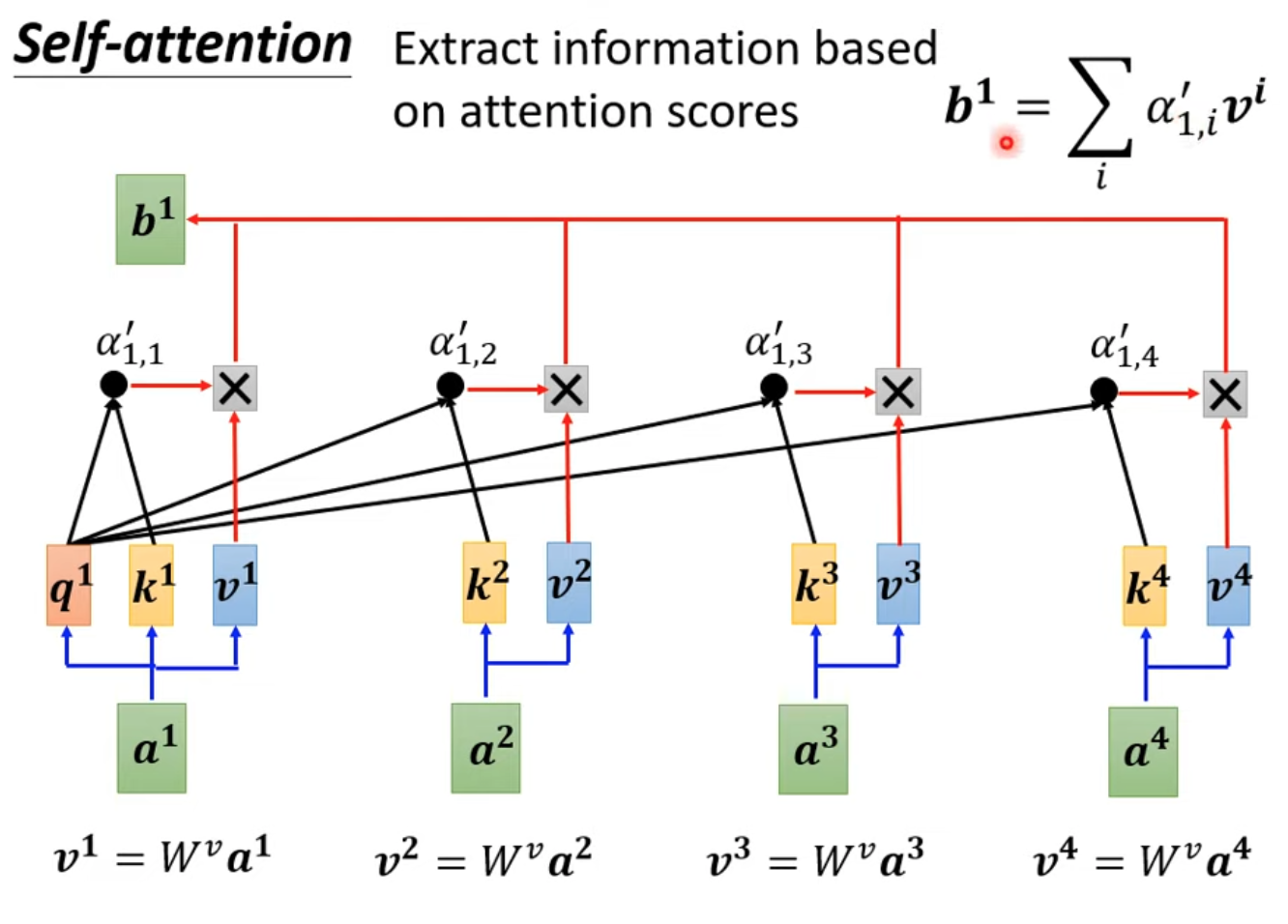
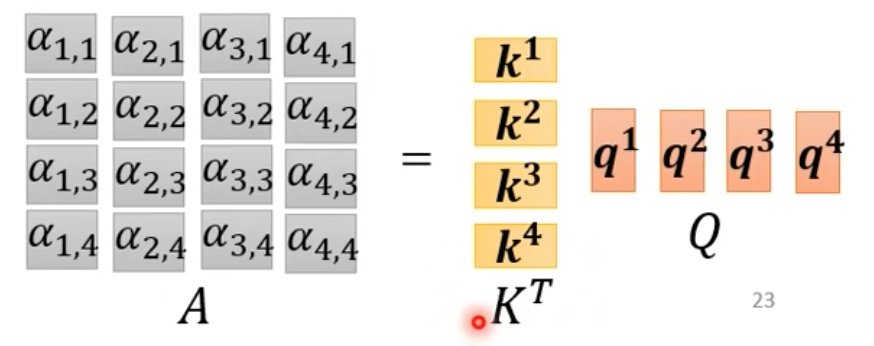
- 延續上篇的內容,b其實可以水平同時計算
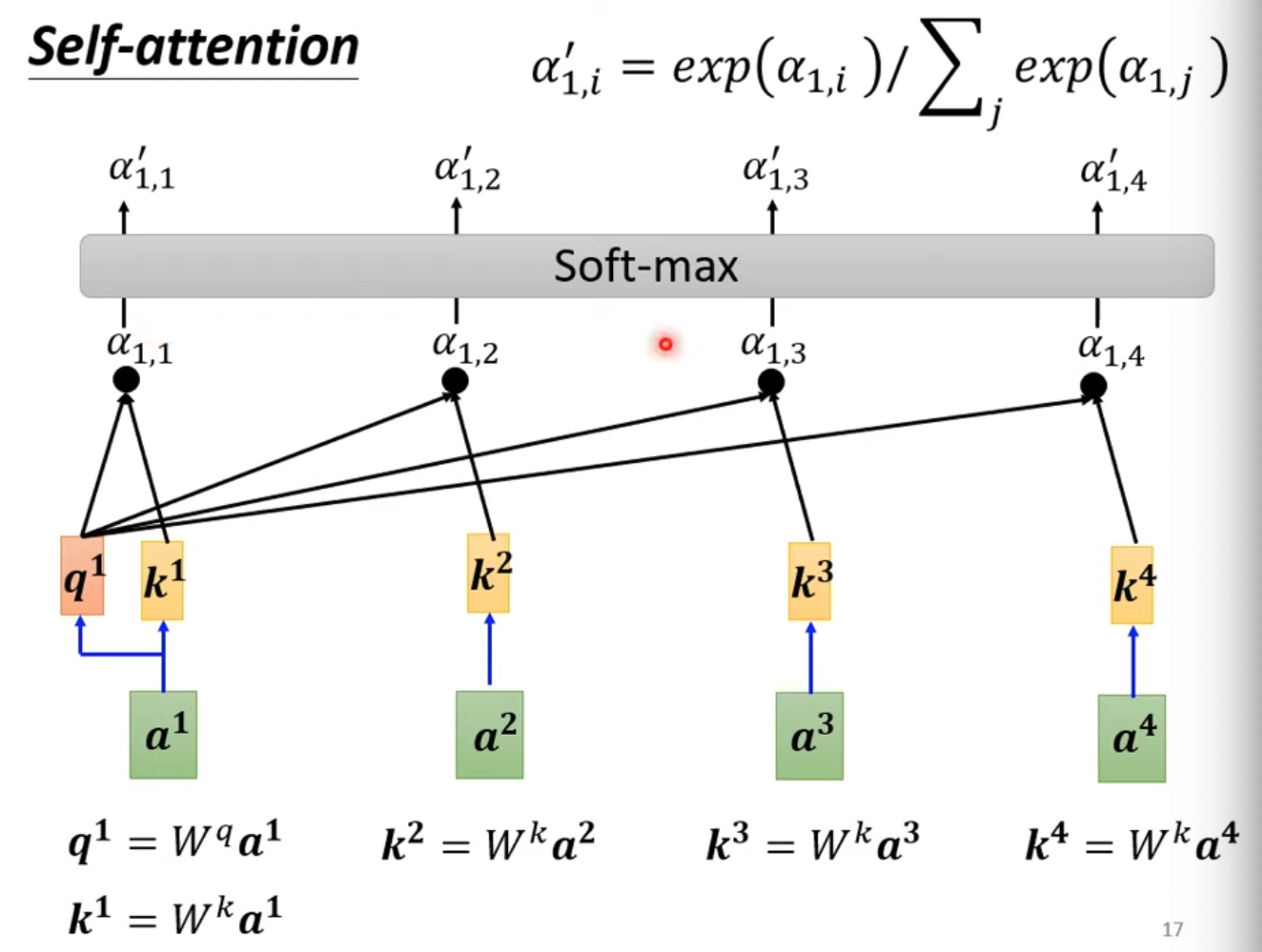
線性代數的角度理解
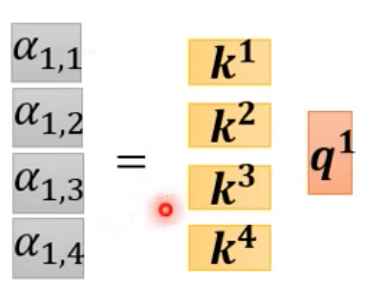
把它延展到$\alpha_{4,4}$
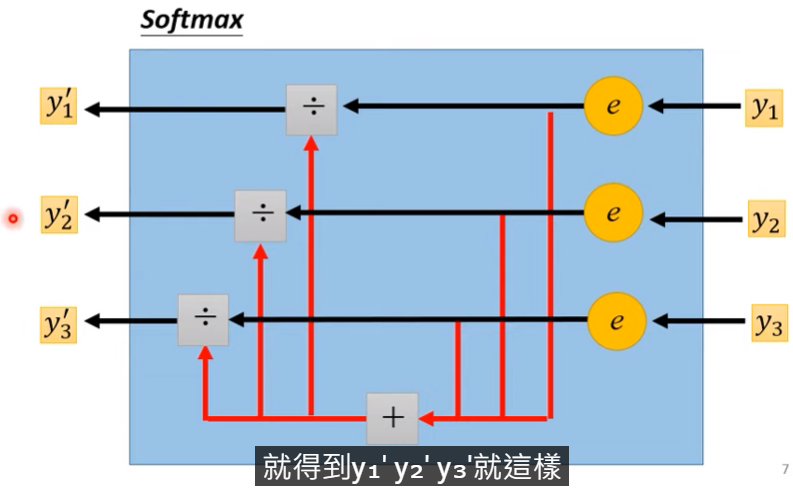
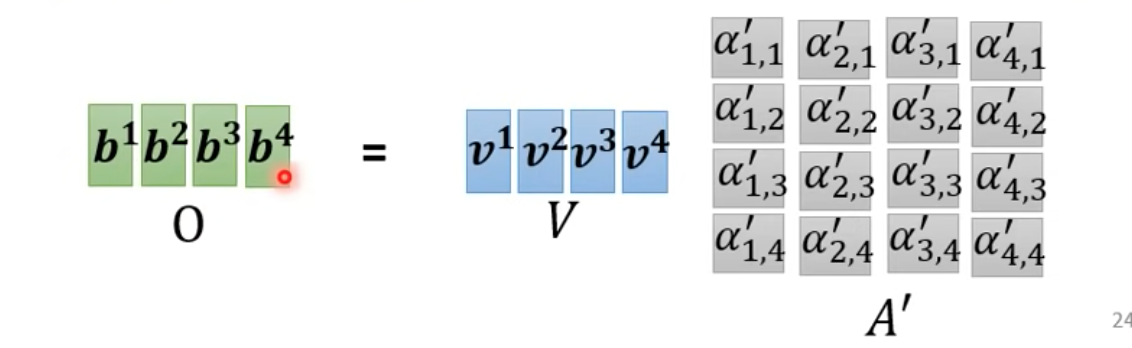
- 之後再對A做softmax(或其他激發函數)得到A’
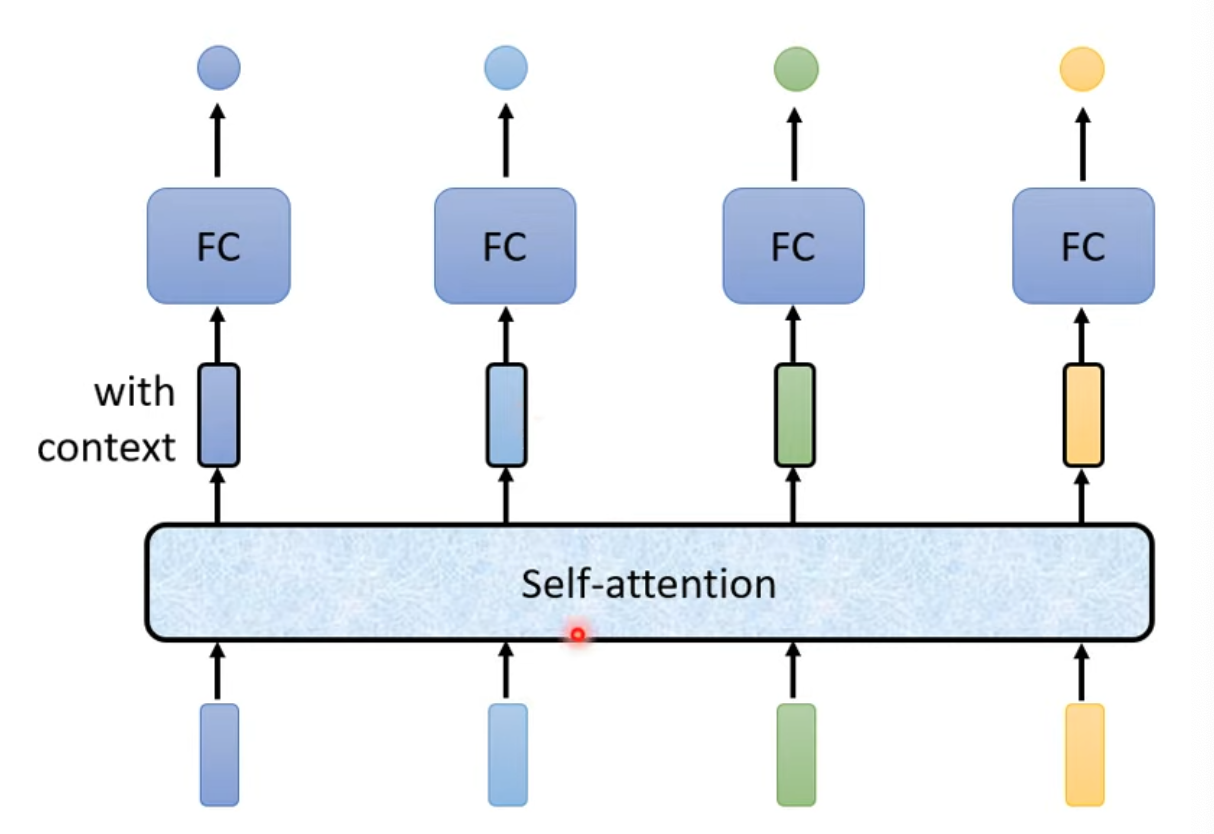
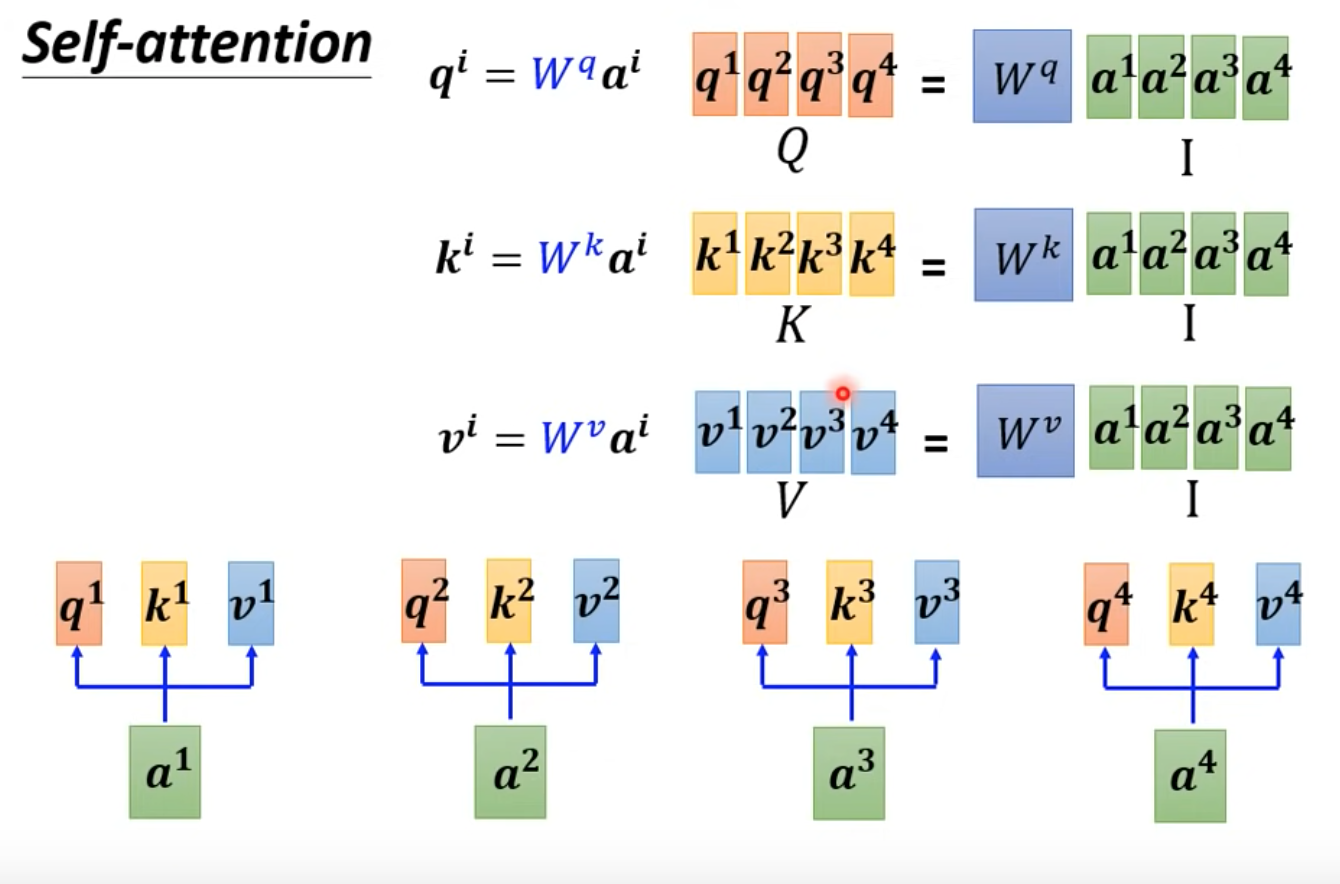
總圖
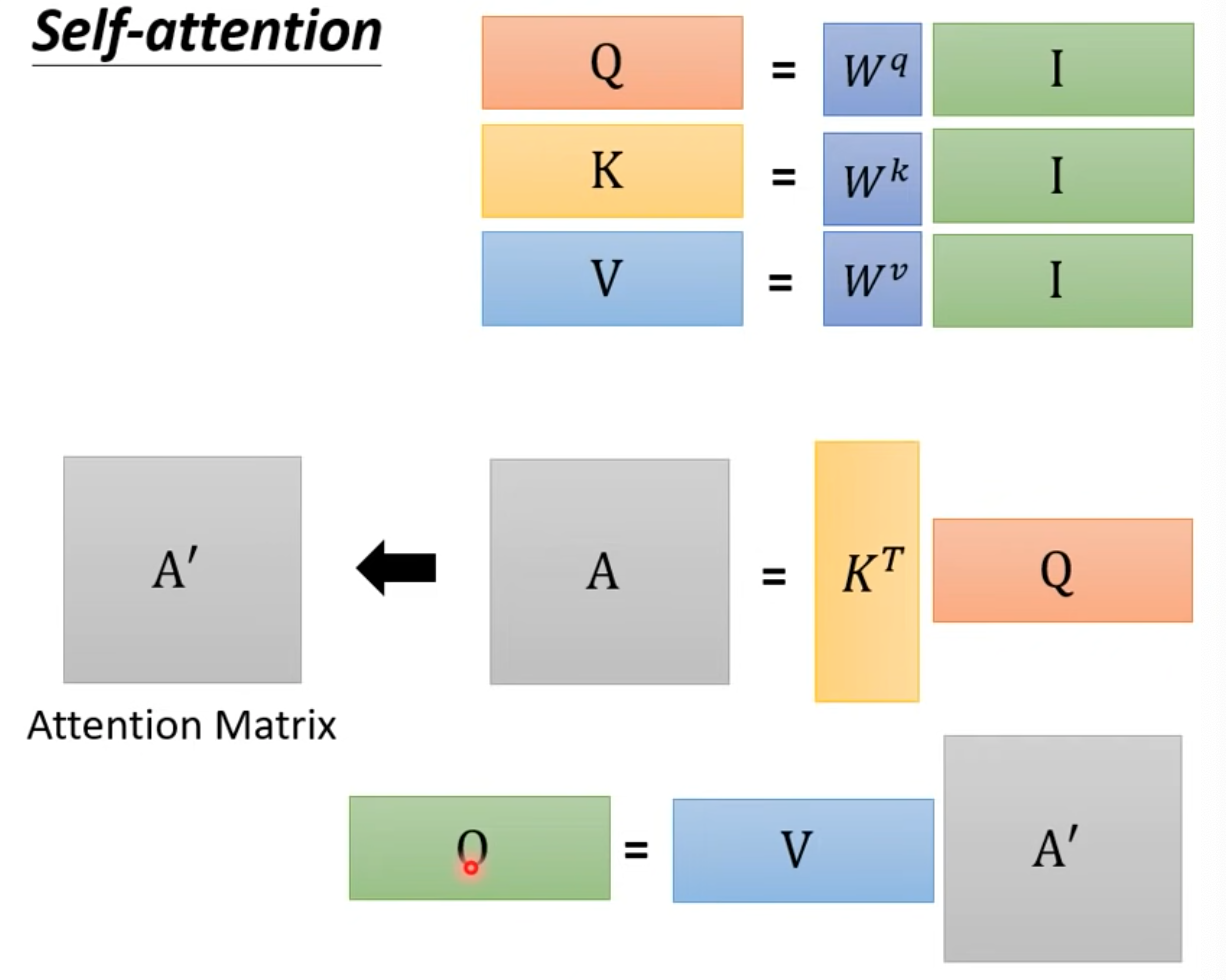
- 上圖中只有$W^{q,k,v}$training data訓練
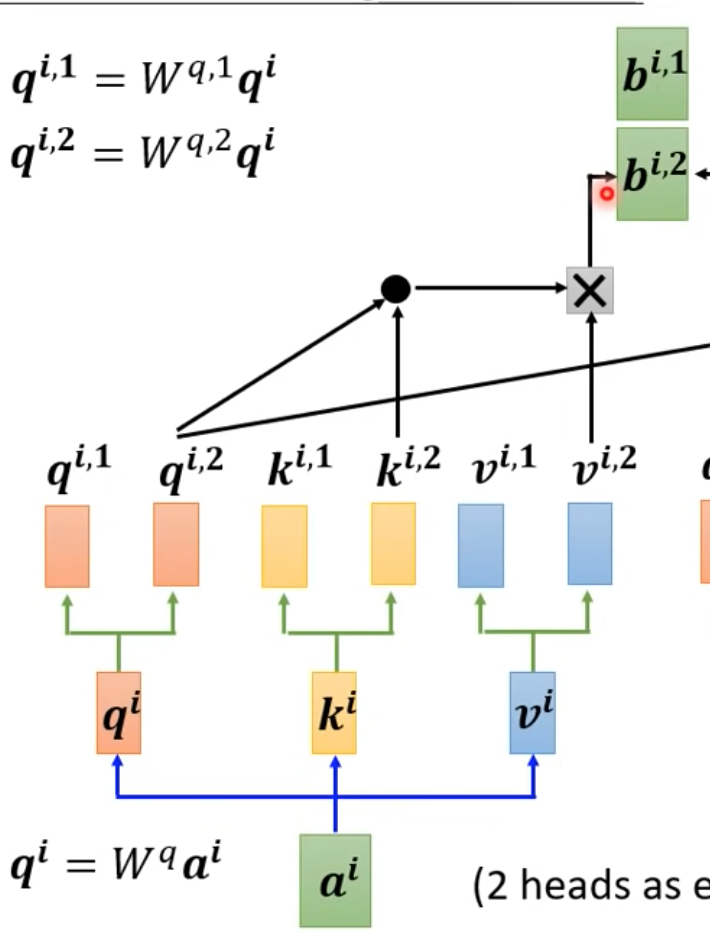
Multi-head self-attention
- 可以把q,k,v產生多個
Positional encoding
- 每一個vector出現在sequence的不同位置可能會有不同的意義
- 前述之計算並無考慮到相對位置,大家算法都一樣,也都有全部平等的計算
- 為每一個位置設置一個vector $e^i$,再把這個vector加上$a^i$
- $e^i$可以透過某個function產生,也可能是hand-crafted
- 或也可以是learn by data
- 仍然是尚待研究的主題
Self-attention應用
- Bert(NLP)
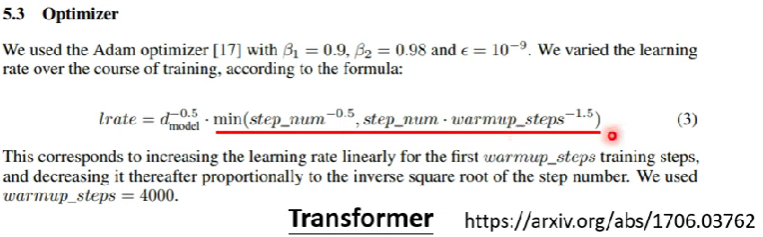
- transformer
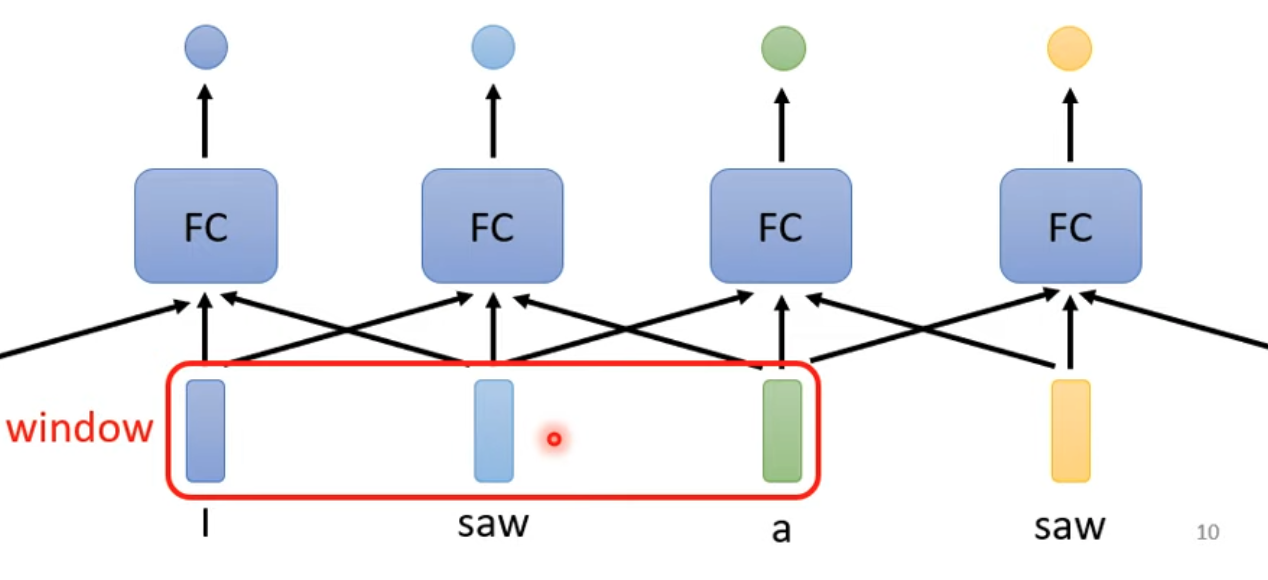
Truncated self-attention
- 當sequence很大,我們的attention matrix會非常大
- 一次訓練的時候不要看所有sequence,看某一段就好
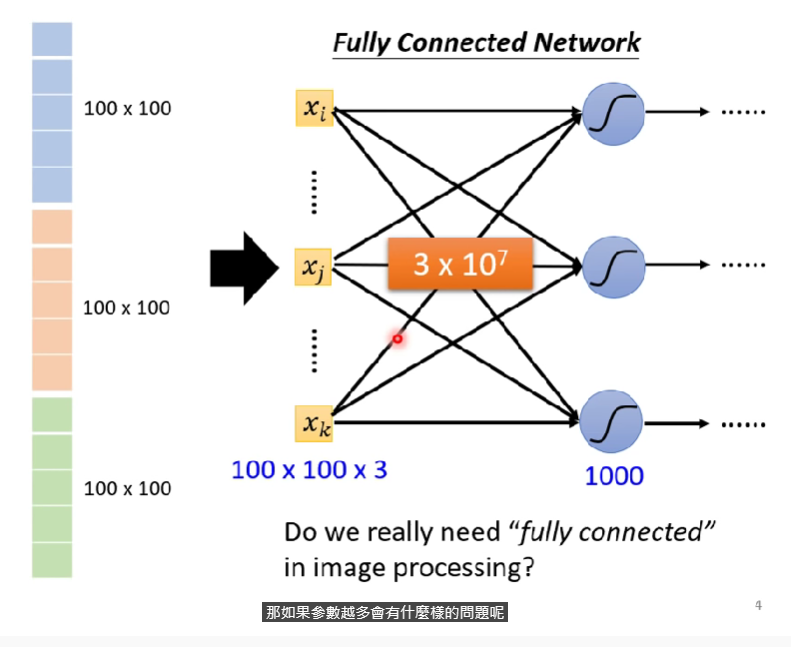
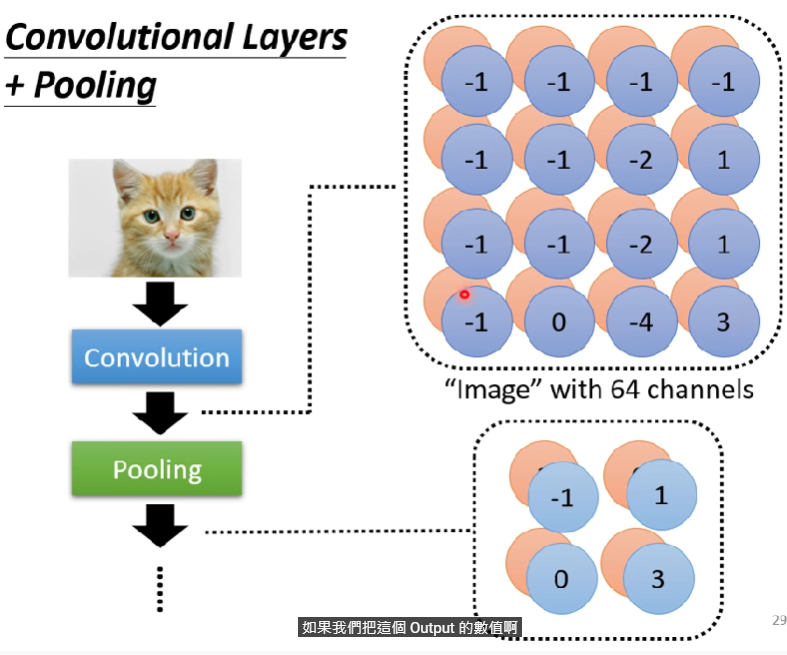
Self-attention for image
- 相片也可以看作是一個vector set,ex. 給定一個5x10 pixel的彩色圖片
- 把channel當作一個vector(RGB)
- 則一張圖片是一個5x10的vector set
- Self-attention GAN
- DETR
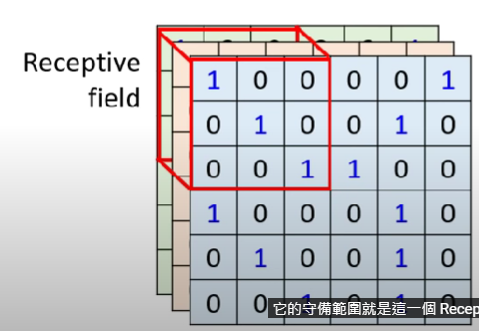
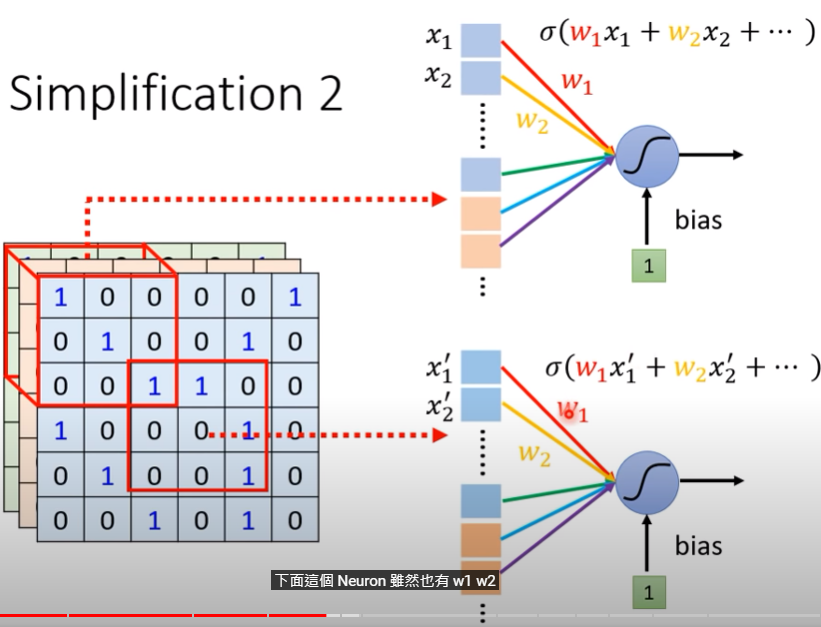
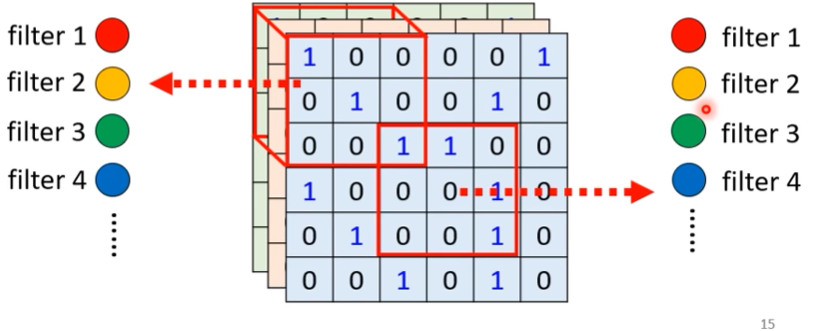
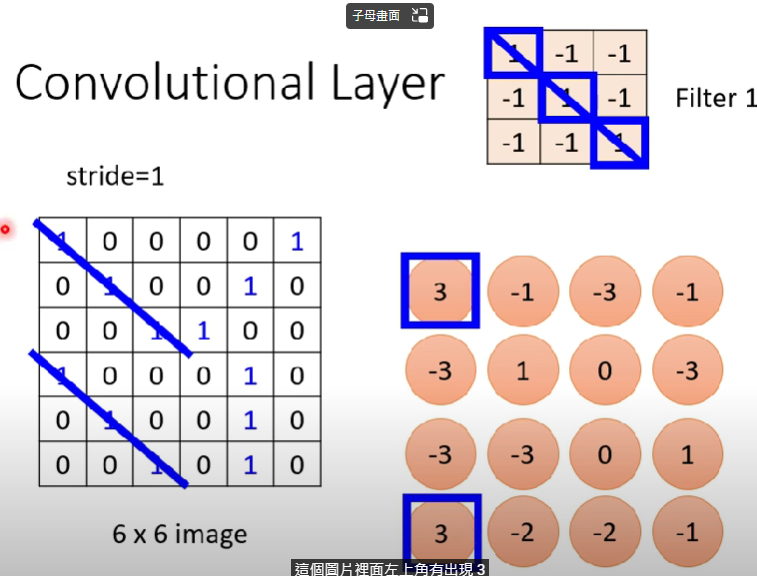
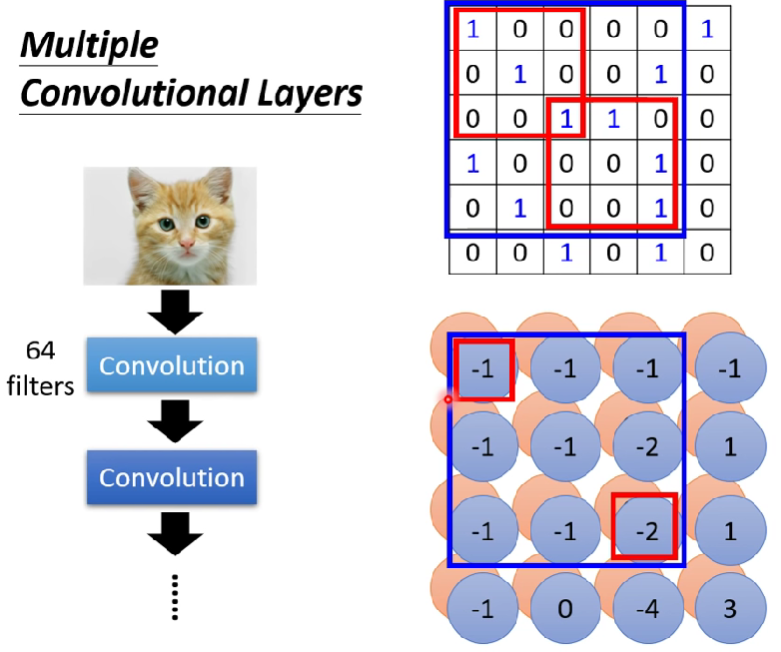
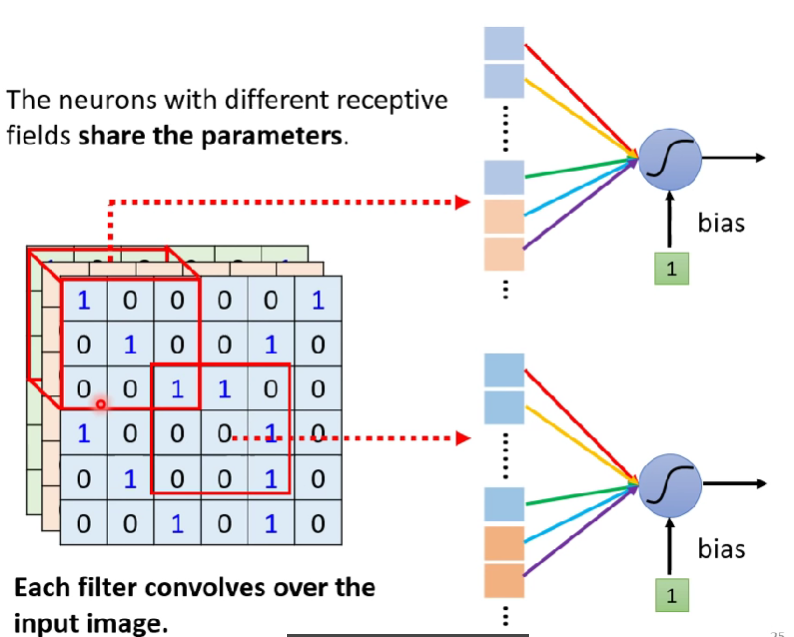
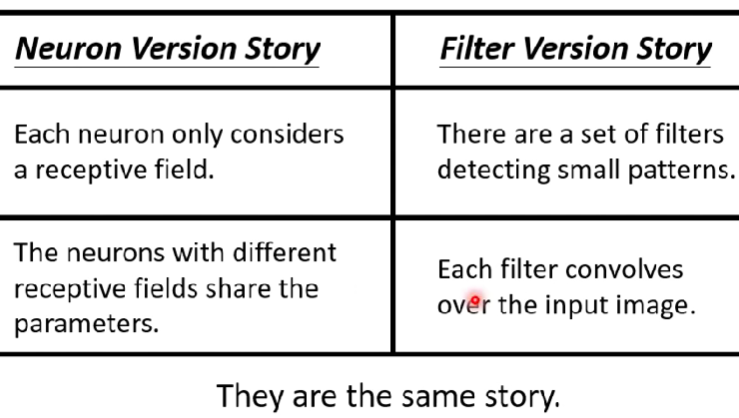
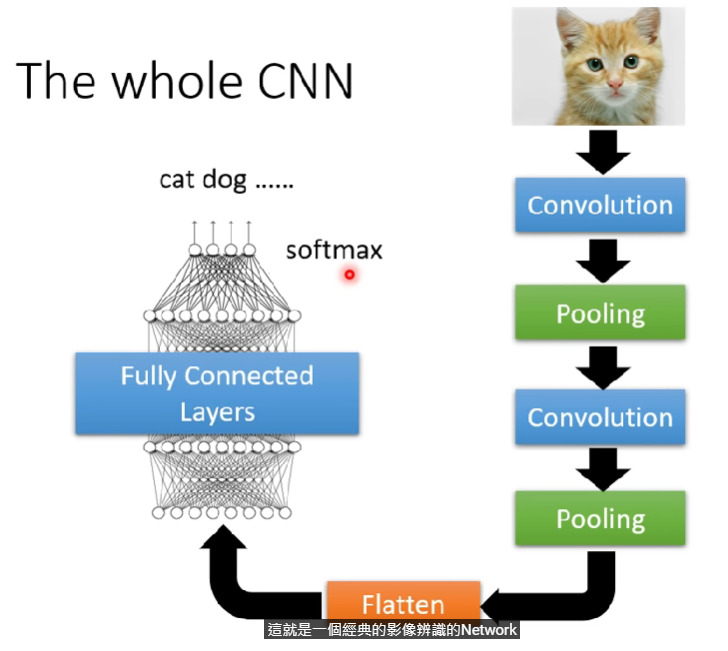
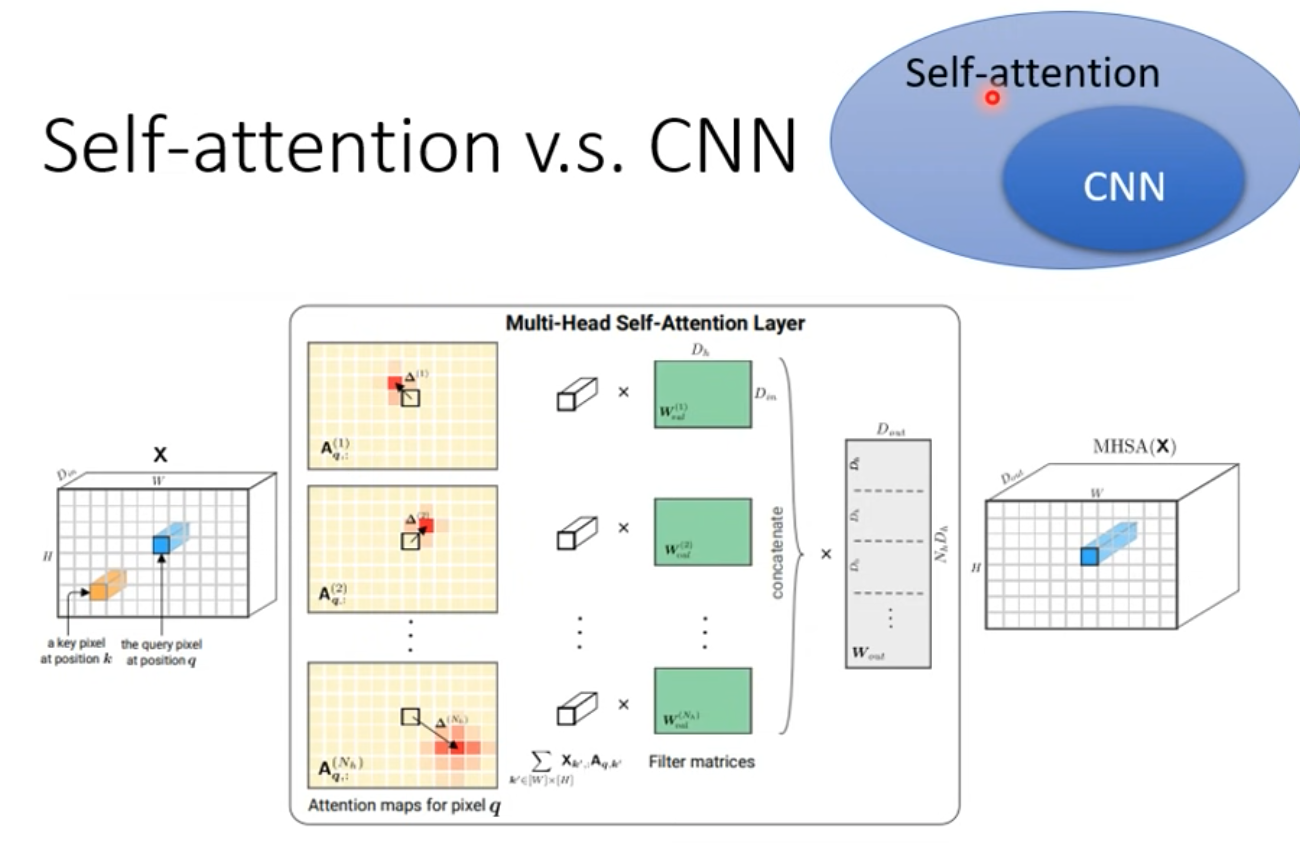
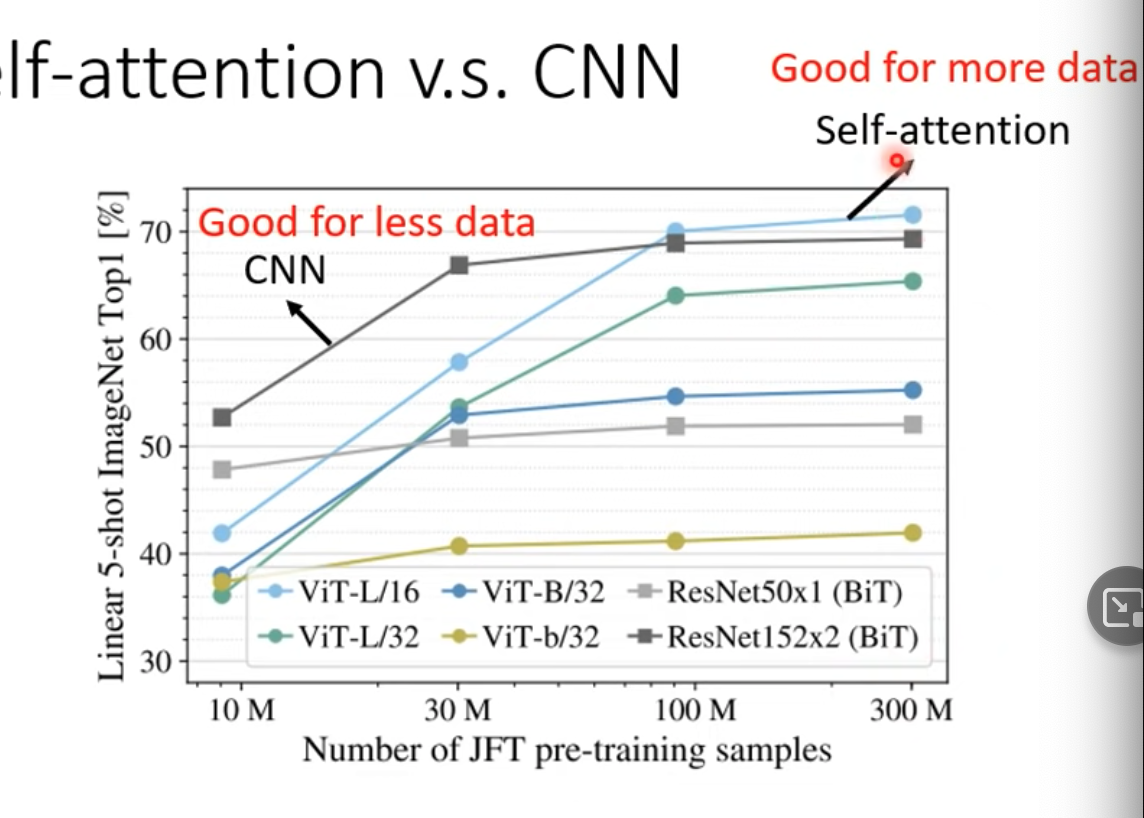
Self-attention v.s CNN
- CNN會考慮receptive field
- self-attention則是會考慮整張圖(整個vector set的vector)
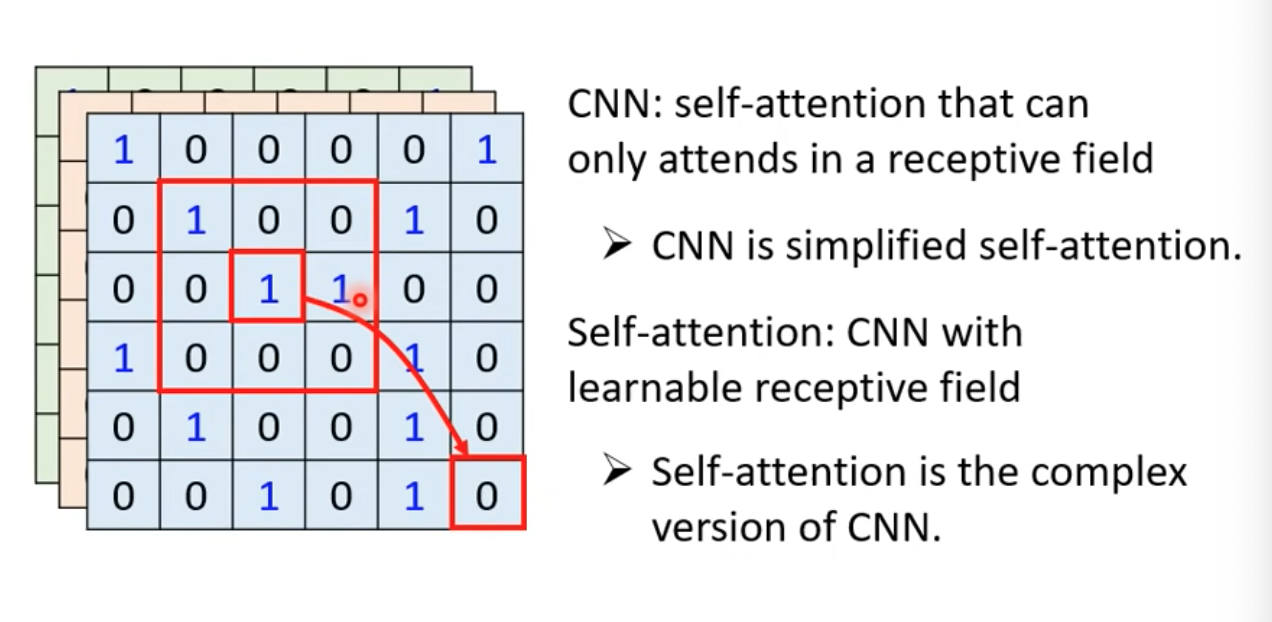
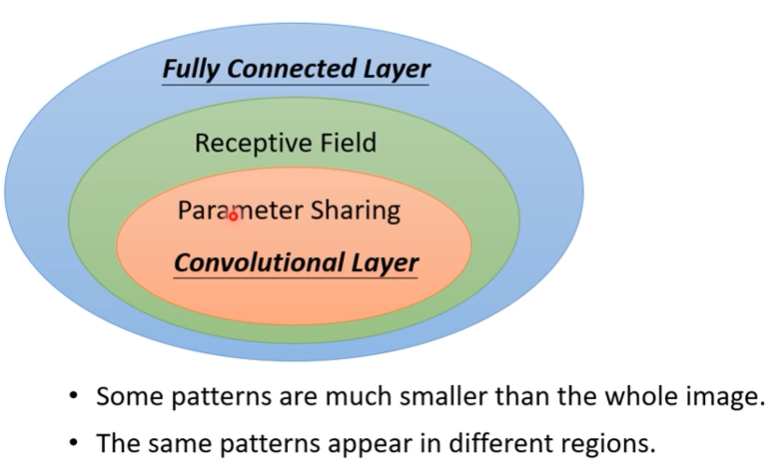
- self-attention可以說是複雜版、更自由的CNN
- receptive field變成可學習、控制的大小(truncated self attention)
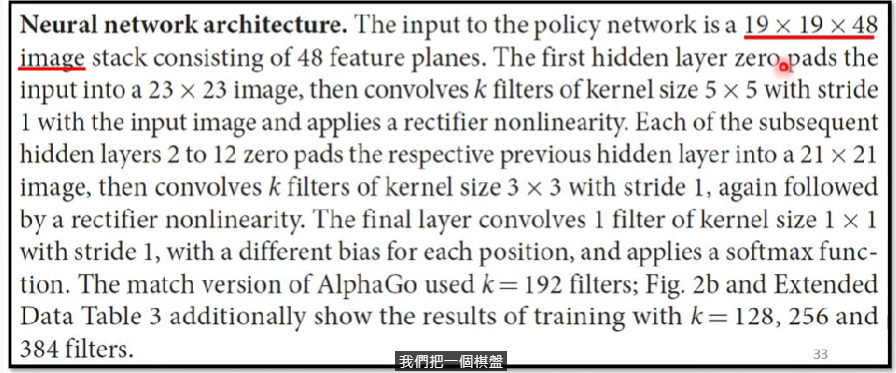
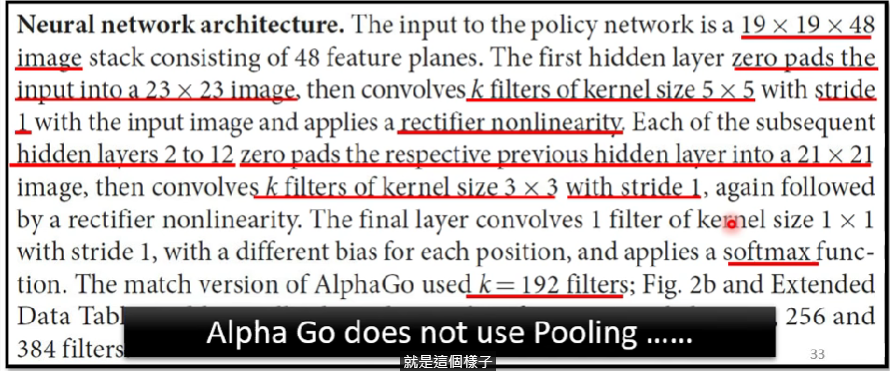
- Ref. CNN章節
- Ref. CNN章節
- 這篇論文用嚴謹的數學證明CNN $\subset$ self-attention
- Ref.一開始的章節,我們知道更flexible的模型需要更多training data
Self-attention v.s RNN
- RNN不再講到,因為self-attention大多可取代
- RNN也是處理input是sequence的情況
- 第一個vector做RNN,輸出丟FC,產生輸出,也加入第二個vector丟入RNN…
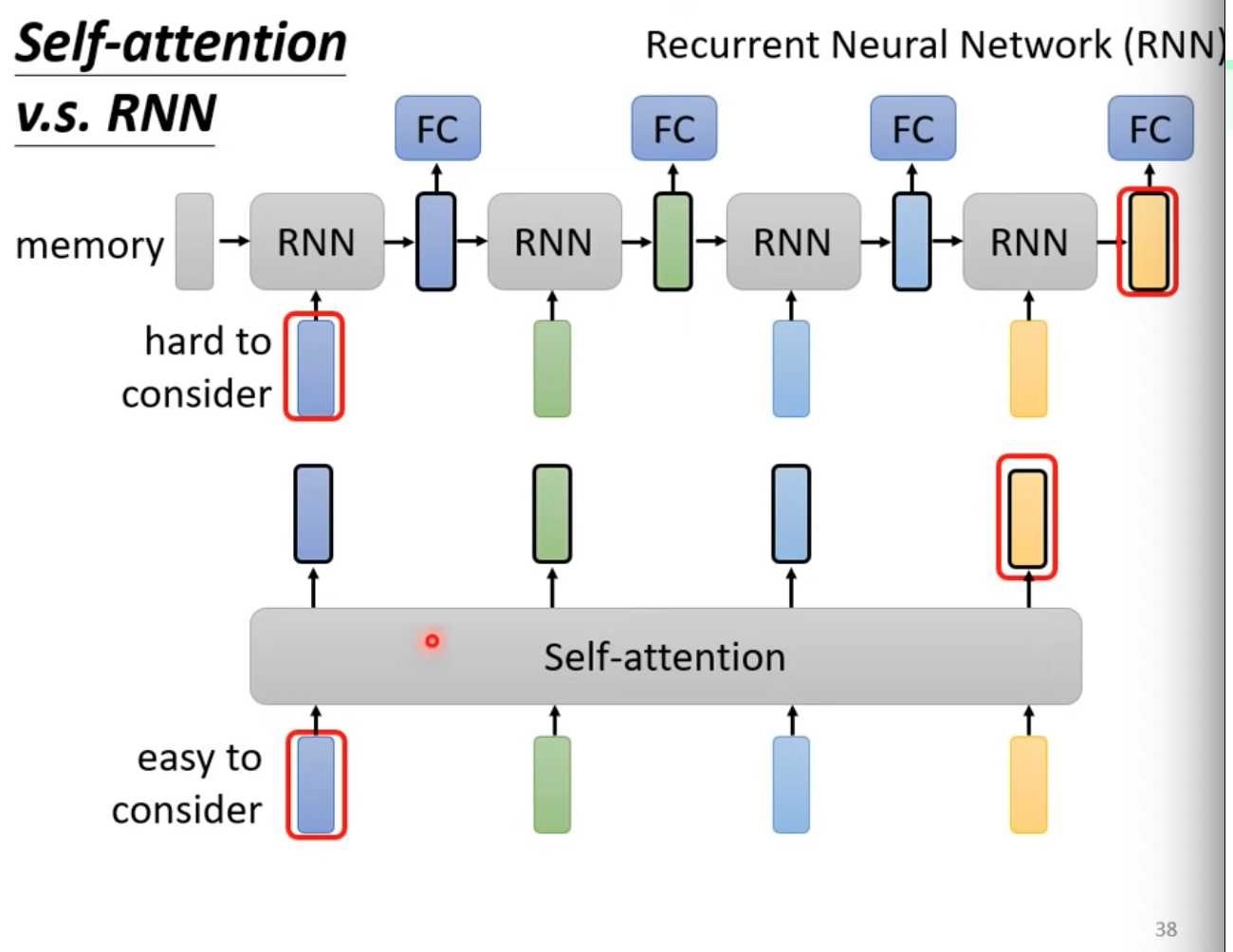
- 第一個vector做RNN,輸出丟FC,產生輸出,也加入第二個vector丟入RNN…
- RNN不可以平行處理,self-attention可以
- RNN難以考慮全面(左右更好),self-attention則可以(天涯若壁鄰)
- Self-attention加上一些東西以後,其實也能變成RNN(ref.)
Self-attention for graph
- 因為edge,所以我們知道哪兩個節點之間會有關聯性
- Attention matrix可以只計算有相連的部分就好
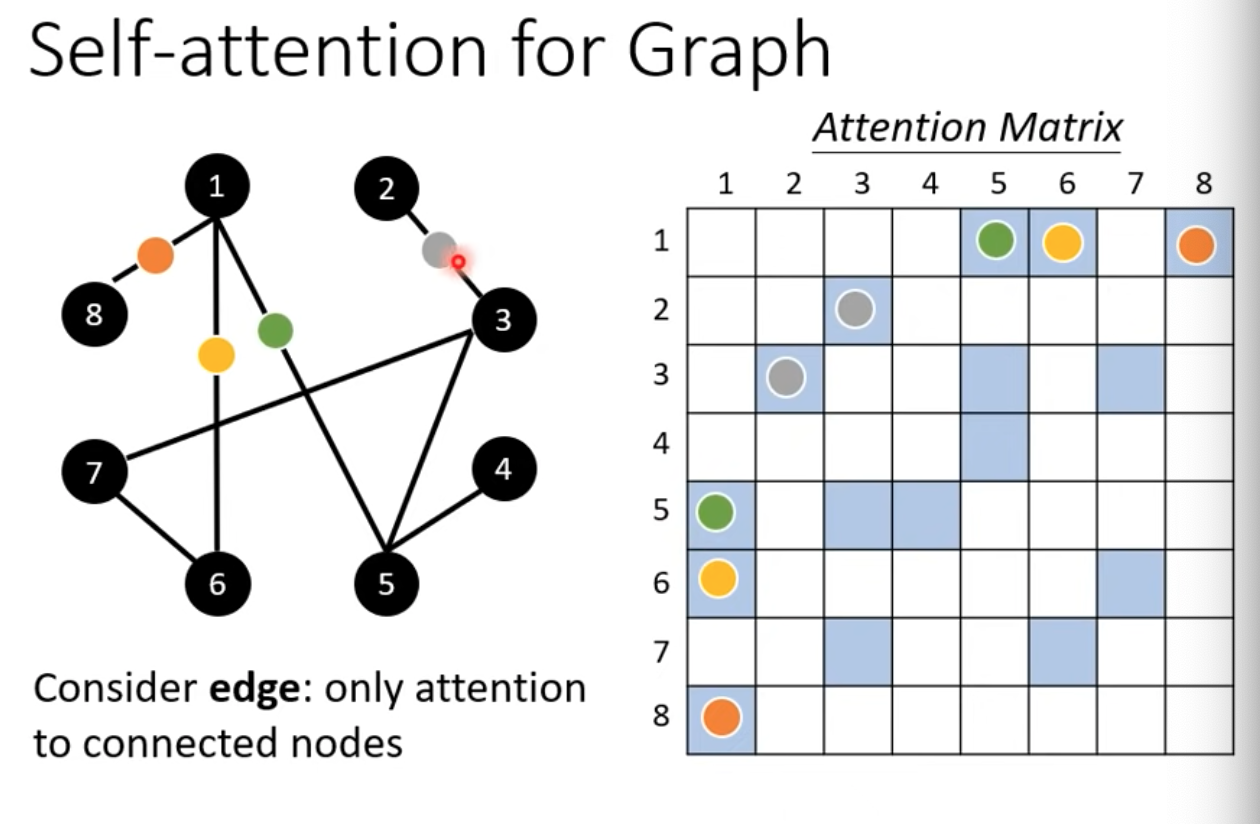
- 這算是一種Graph neural network (GNN)
GNN REF.
結論
- Self-attention有很多種變形
- 他的缺點是計算量過大(廣義版CNN…汗)
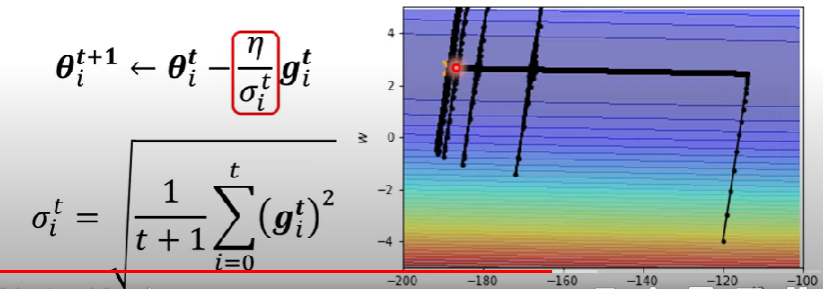
- self-attention最早用於transformer
- 有時候叫transformer其實就是指self-attention
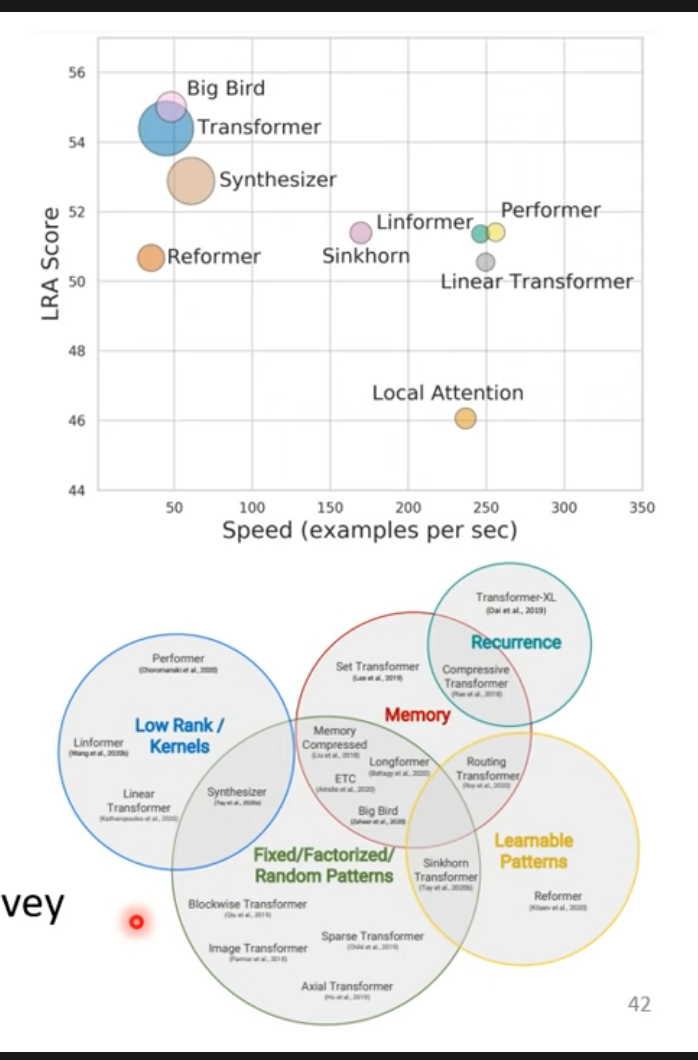
- performance跟speed的平衡
- 介紹各式各樣的transformers的變形:Efficient Transformers: A survey